Περιγραφή του ομίλου
Ο ψηφιακός αλφαβητισμός (European Commission, 2015) επιβάλει τη γνώση προγραμματισμού ως ένα από τα προσόντα που πρέπει να έχουν οι σύγχρονοι νέοι. Ταυτόχρονα βασικό παράλληλο προσόν είναι η υπολογιστική σκέψη και οι δεξιότητες επίλυσης προβλήματος (problem solving). Τα παραπάνω μπορούν να επιτευχθούν με χρήση ρομποτικών συστημάτων που εξιτάρει το ενδιαφέρον των μαθητών. Στο συγκεκριμένο όμιλο θα ακολουθηθεί η προσέγγιση του εποικοδομιτισμού (constructivism), η οποία θεμελιώθηκε από τον Jean Piaget. Πιο συγκεκριμένα οι μαθητές θα εργάζονται ομαδικά, θα αλληλοεπιδρούν, θα προτείνουν λύσεις, θα τις ελέγχουν και θα τις διορθώνουν μόνοι τους μέχρι να επιλύσουν το πρόβλημα που αντιμετωπίζουν και άρα μέσα από αυτή τη διαδικασία να αποκτήσουν υπολογιστική σκέψη και πρωτίστως δεξιότητες επίλυσης προβλημάτων.
Μέσα από τον όμιλο επιθυμούμε οι μαθητές μας να μπορούν:
- να συναρμολογούν το lego EV3
- να χρησιμοποιούν το λογισμικό της lego για να το προγραμματίζουν και κυρίως να μπορούν να το κινούν όπου επιθυμούν μέσα από κατάλληλες εντολές και συγκεκριμένες κινήσεις όπως κίνηση σε ευθεία, στροφή (curve, pivot, spin) κ.λ.π.
- να χρησιμοποιούν τα κουμπιά του ρομπότ για να δίνει ο χρήστης του ρομποτ είσοδο σε αυτό
- να εγκαθιστούν και να χρησιμοποιούν αισθητήρες για να βοηθούν το ρομπότ στην κίνηση (π.χ. οδήγηση του ρομπότ πάνω σε γραμμή)
Στόχο μας επίσης αποτελεί και η συμμετοχή των μαθητών μας στον Πανελλήνιο διαγωνισμό ρομποτικής της WRO Hellas και η προσπάθεια τους μέσα από την ομαδική δουλειά να φέρουν εις πέρας με το ρομποτικό τους σύστημα την αποστολή που θα τεθεί στο διαγωνισμό
Μαθήματα του ομίλου
Αν δεν μπορείτε να δείτε το pdf. Κατεβάστε το από εδώ
Αφού μάθατε τις στροφές προσπαθήστε να φέρετε εις πέρας τις δύο αποστολές που περιγράφονται στην παρακάτω εικόνα
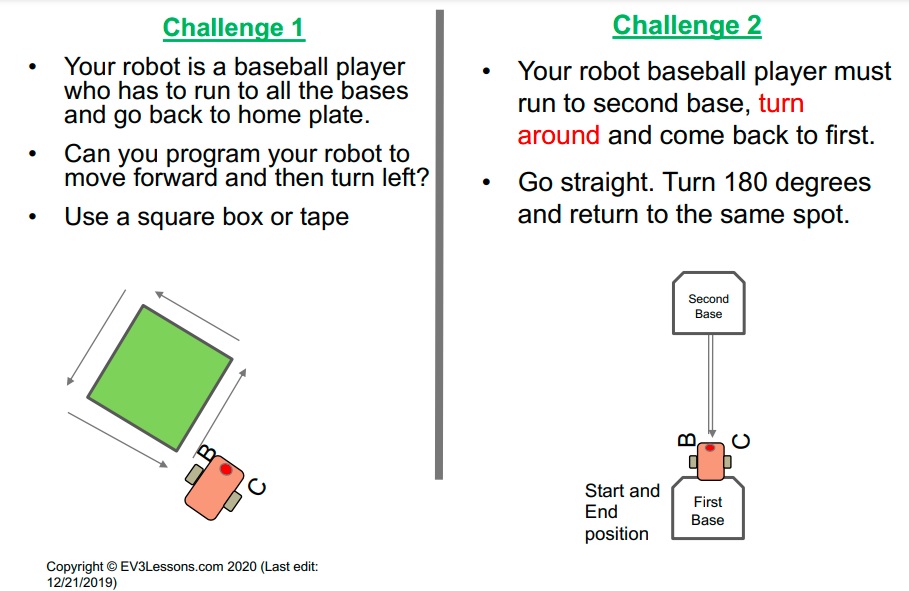
Οδηγίες για τη 2η αποστολή:
- Ο εκπαιδευτικός θα τοποθετήσει τη γραμμή της πρώτης βάσης και τη γραμμή της 2ης βάσης.
- Με το port view μετρήστε την απόσταση
- Θέστε στο robot τoυς κινητήρες στις θέσεις b και c
- Θέστε την ταχύτητα των κινητήρων στο 30%
- Κάντε το robot να κινηθεί ευθεία τόσα degrees όσα μετρήσατε στο βήμα 2
- Κάντε στο robot ένα spin δεξιά (move steering 100) 360 degrees ώστε να γυρίσει επιτόπου 180 μοίρες
- Κάντε το robot να κινηθεί ευθεία τόσα degrees όσα μετρήσατε στο βήμα 2
- Κάντε στο robot ένα spin δεξιά (move steering 100) 360 degrees ώστε να γυρίσει επιτόπου 180 μοίρες
- Σταματήστε το πρόγραμμα
Οδηγίες για την 1η αποστολή
- Ο εκπαιδευτικός τοποθετεί ταινία που οριοθετεί το ορθογώνιο
- Με το port view μετρήστε την απόσταση της 1ης πλευράς του ορθογωνίου
- Με το port view μετρήστε την απόσταση της 2ης πλευράς του ορθογωνίου
- Θέστε στο robot τoυς κινητήρες στις θέσεις b και c
- Θέστε την ταχύτητα των κινητήρων στο 30%
- Κάντε το robot να κινηθεί ευθεία τόσα degrees όσα μετρήσατε την 1η πλευρά του ορθογωνίου
- Κάντε στο robot ένα pivot αριστερά (move steering -50) 360 degrees ώστε να γυρίσει 90 μοίρες
- Κάντε το robot να κινηθεί ευθεία τόσα degrees όσα μετρήσατε την 2η πλευρά του ορθογωνίου
- Κάντε στο robot ένα pivot αριστερά (move steering -50) 360 degrees ώστε να γυρίσει 90 μοίρες
- Επαναλάβατε τα βήματα 6,7,8 και 9
- Σταματήστε το πρόγραμμα
Αν δεν μπορείτε να δείτε το pdf. Κατεβάστε το από εδώ
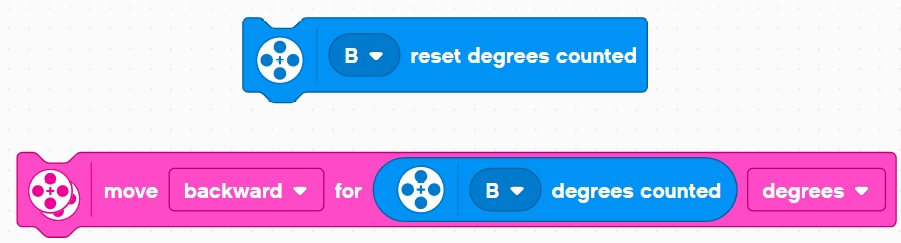
Ας προσπαθήσουμε να χρησιμοποιήσουμε και τις μετρήσεις για να μετρήσουμε πόση είναι η απόσταση που διανύθηκε ώστε το robot όταν φτάσει στην μαύρη γραμμή να κάνει κάνει backward τόσα degrees όσα προχώρησε. Θα σας βοηθήσουν οι εντολές της πρώτης εικόνας στον παρακάτω πίνακα
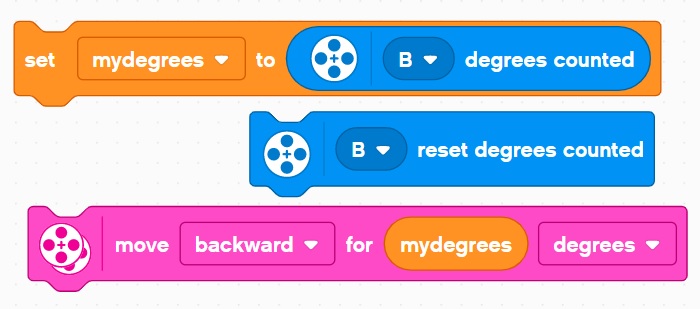
Προσπαθήστε στη συνέχεια με τη βοήθεια του εκπαιδευτικού σας να ορίσετε μία μεταβλητή mydegrees και όταν το robot φτάνει στην μαύρη γραμμή να καταχωρεί τα degrees στη μεταβλητή σας να κάνει μία spin στροφή 180μοιρών και να γυρίζει ακριβώς στη θέση όπου ξεκίνησε και με μία νέα spin στροφή να ξανακοιτά προς τη γραμμή
 |
 |
Στη συνέχεια θα δούμε πως να ακολουθεί το robot μας μία γραμμή.
Μελετήστε μαζί με τον εκπαιδευτικό σας το .pdf που ακολουθεί και προσπαθήστε αφού καταλάβετε όσο καλύτερα μπορείτε να ζητήματα που τίθενται να βάλετε το robot να κινείται σε μία μαύρη γραμμή για πάντα, ή μέχρι να πατηθεί το κεντρικό κουμπί του brick ή μέχρι να κάνει 5 rotations. Στη συνέχεια προσπαθήστε να κάνετε το robot να κινείται στη μαύρη γραμμή μέχρι να συναντήσει πράσινο χρώμα. Φτιάξτε τα προγράμματα σας, ώστε να ξεκινούν όταν πατάτε το πάνω κουμπί του brick και να τα φορτώνεται στο brick και να τα δοκιμάζετε στην κυκλική διαδρομή που υπάρχει στο μέσο του εργαστηρίου.
Αν δεν μπορείτε να δείτε το pdf. Κατεβάστε το από εδώ
Στο επόμενο μάθημα θα μάθουμε τι είναι το callibration και πως γίνεται πράγμα που είναι πολύ σημαντικό για την όσο το δυνατόν πιο σωστή λειτουργία του αισθητήρα χρώματος. Στη συνέχεια θα δούμε πως μπορούμε να ακολουθήσουμε μία γραμμή πιο ομοιόμορφα χρησιμοποιώντας το γεγονός ότι όταν ο αισθητήρας χρώματος είναι ανάμεσα σε μαύρο και άσπρο έχει μία ενδιάμεση τιμή, οπότε δε θα κάνουμε απότομες στροφές. Οι εντολές θα είναι λίγο πιο πολύπλοκες. Θα δούμε επίσης και την ακολουθία γραμμής με δύο αισθητήρες και πως μπορώ με τους δύο αισθητήρες να σταματάει το robot σε διασταυρώσεις
Μελετήστε με τον εκπαιδευτικό σας το παρακάτω .pdf και:
- κάντε το robot να ακολουθεί μία γραμμή με χρήση δύο αισθητήρων. Δοκιμάστε την υλοποίησή σας στην πίστα.
- Στη συνέχεια κάντε το robot να ακολουθεί τη γραμμή και να σταματά όταν δει διασταύρωση και
- Σαν αποστολή κάντε το robot να ακολουθεί γραμμή…
- μέχρι να δει κόκκινο χρώμα.
- Όταν δει διασταύρωση να στρίβει αριστερά,
- Όταν δει πράσινο χρώμα να κάνει spin αναστροφή.
θα σας βοηθήσουν οι διαφάνειες στο .pdf. Δοκιμάστε την αποστολή σας σε πίστα που θα έχει φτιαχτεί ή θα φτιάξετε εσείς.
Αν δεν μπορείτε να δείτε το pdf. Κατεβάστε το από εδώ
Για την ακολουθία γραμμής με δύο αισθητήρες μπορείτε να δοκιμάστε και την υλοποίηση της παρακάτω εικόνας. Πηγή: https://nikmavr.sites.sch.gr/ και πιο συγκεκριμένα: https://www.youtube.com/watch?v=UbsoqT8O6LM
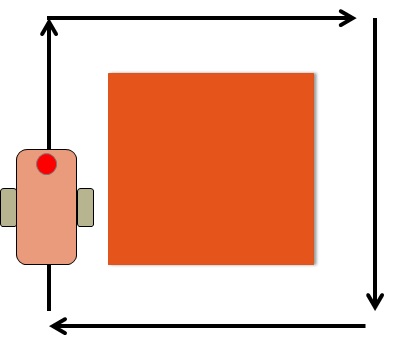
Αποστολή 1: Σε αυτό το μάθημα θα θυμηθούμε την αποστολή που το robot μας έκανε ένα τετράγωνο. Η αποστολή σας λοιπόν είναι να κάνετε το robot να γυρίζει γύρω από ένα τετράγωνο διανύοντας σε κάθε πλευρά του απόσταση όσο 1 rotation των κινητήρων του. Θυμηθείτε ότι πρέπει το robot να προχωρήσει μπροστά 1 rotation στην συνέχεια να κάνει δεξί pivot 1 rotation και να επαναλάβει την ίδια κίνηση 4 φορές ώστε να διαγράψει το τετράγωνο. Θα χρειαστείτε το repeat block. Στις εικόνες παρακάτω σας δίδεται η αποστολή και ο μισοψημένος κώδικας επίλυσης
 |
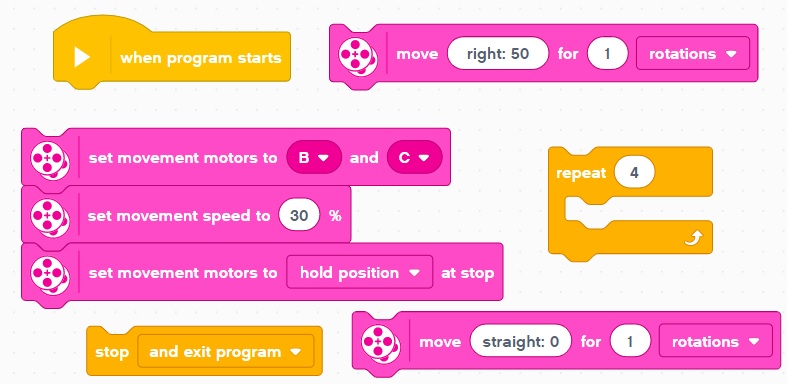 |
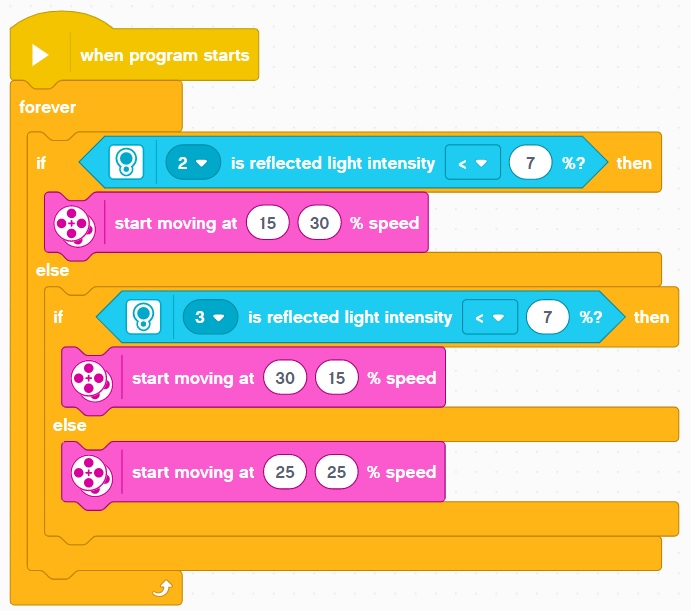
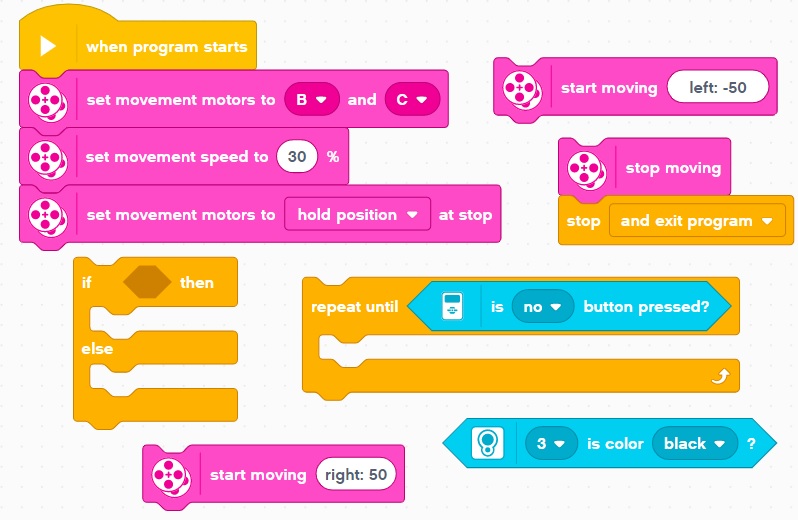
Αποστολή 2: Χρησιμοποιείστε τον αισθητήρα χρώματος για να κάνετε το robot να κινείται πάνω σε μία γραμμή με zik – zak μέχρι να πατηθεί το “no button” δηλαδή το button που σβήνει το robot. Την αποστολή την έχετε κάνει ήδη. Θέλουμε απλά να θυμηθούμε τη δομή επιλογής if. Ο μισοψημένος κώδικας σας δίδεται στην παρακάτω εικόνα:
Ακολουθούν δύο .pdf με διαφάνειες για τα loops και τα switches από το ev3lessons.com
Αν δεν μπορείτε να δείτε το pdf. Κατεβάστε το από εδώ
Αν δεν μπορείτε να δείτε το pdf. Κατεβάστε το από εδώ
Δείτε παρακάτω φωτογραφικό υλικό και video ανά μάθημα